Studien
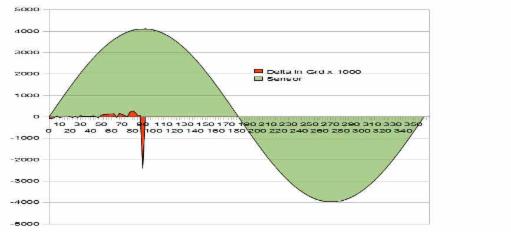
Linearität
Linearität des Sensors,gemessen mit der GP Montierung.
Im Bereich 0 bis 80° liegt der Fehler unter 6' mit einfachem manuellen Testaufbau.
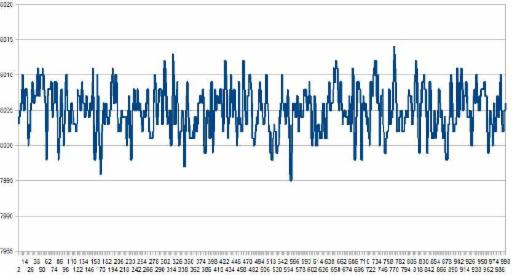
Rauschverhalten JW24F14
Aufzeichnung von 1000 Messpunkten in Ruhestellung
Sortierung der Messwerte aufsteigend. Medianfilter als möglicher Einsatz für Mittelwertbildung. (Messwerte werden in einem Array aufsteigend sortiert und der mittlere Arraywert ausgelesen)
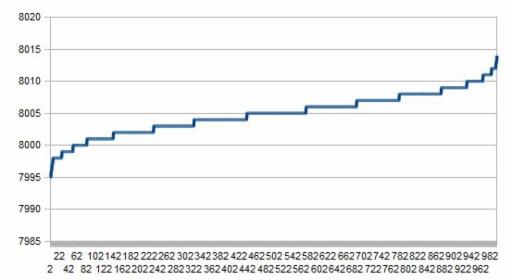
Aussreiser beeinflussen die Mittelwertbildung erheblicher als der Medianfilter. Hier werden diese lediglich an den Rand platziert.
C++ Programm zum Aufzeichnen des JW24F14 Rauschverhaltens
#include <stdio.h>
using namespace System;
using namespace System::IO;
int main(){
JOYCAPS jc;
joyGetDevCaps(0, &jc, sizeof(JOYCAPS));
WORD xid=jc.wPid;
/Definitionen
UINT JOYSTICKID;
JOYINFO joyinfo;
//JOYCAPS joycaps;
unsigned int Xwert, Ywert, Zwert;
//Auswahl des Joysticks
JOYSTICKID = 0;
StreamWriter ^datei = gcnew StreamWriter("Rauschen.txt");
//Abfrage (in Programm einbinden)
int i;
for (i=1;i<1000;i++)
{
joyGetPos(JOYSTICKID, &joyinfo);
//Hole X,Y,Z und Buttonwerte
Xwert = joyinfo.wXpos/4;
Ywert = joyinfo.wYpos/4;
Zwert = joyinfo.wZpos/4;
Console::WriteLine(Xwert);
Console::WriteLine(Ywert);
//Console::ReadLine();
Sleep(10);
datei->Write(Xwert + ";" + DateTime::Now.Ticks +";\n");
}
datei->Close();
}
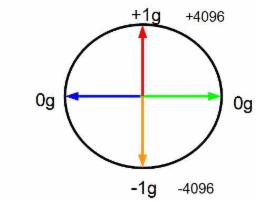
Messbereich und Auflösung des Sensors
Laut Datenblatt Auflösung 14 bit bei ± 1g
bei einer Initial- Auflösung 14 bit bei ± 2g sind dies für ± 1g genau 13 bit
also beträgt der Messbereich ± 8192 bzw 4096 für jeweils 1g oder
der Bereich 0° bis 90° erstreckt sich über 4096 Messwerte
Messbereich bei 2g
Fehlerbetrachtung
Die Soll-Ist-Abweichung der Messungen am Beschleunigungssensor setzt sich zusammen aus:
allgemeine Aufstellungsfehler
Abweichung in Azimut (Südrichtung)
Neigung der Azimutebene
Höhenabweichung der Polachse
Sensoren-Ausrichtungsfehler
Achsabweichung der Sensorachsen x,y,z gegenüber dem Teleskop.
Nichtlineare Fehlerrechnung
Korrektur der Nichtlinearität der Sensoren
Ermittlung einer Korrekturmatrix über den kompletten Raumwinkel in einem Gitternetz von 10 bis 30° zur Interpolation innerhalb des Gitterpunkte.(Pointing)
-------------------------------------------------------------------------------------------------------------------
Der Aufstellungsfehler wird im ersten Schritt nicht berücksichtigt, da davon ausgegangen wird, das das Teleskop gescheinert ist und damit in Höhe und Azimut ausgerichtet ist.
Die nichtlinearen Fehler werden erst später in Betracht gezogen, wenn eine höhere Messgenauigkeit angestrebt werden soll.
D.h. die Korrekturrechnung beschränkt sich auf den Sensor-Ausrichtungsfehler.
Der Sensor weist gegenüber dem Teleskop einen Drehwinkel in x, y, und z auf.
Da ein konstanter Drehwinkel keine konstante Höhenabweichung aufweist sondern eine Funktion des Stundenwinkels und der Deklination ist, lässt sich die Höhenabweichung am besten durch ein rotierendes Koordinatensystem beschreiben.
Nach diesen Überlegungen wurde eine mathematische Beschreibung für den Ausrichtungsfehler zusammengestellt.
Die Genauigkeit und die Methoden zur Ermittlung der Achsabweichung des Sensors spiegeln sich in der Teleskopkalibrierung und dem Alingnmentverfahren im Programm wieder.
Aussreiser beeinflussen die Mittelwertbildung erheblicher als der Medianfilter. Hier werden diese lediglich an den Rand platziert.
C++ Programm zum Aufzeichnen des JW24F14 Rauschverhaltens
#pragma
comment
( lib,
"WinMM.Lib"
)
#include
<Windows.h>
#include <stdio.h>
using namespace System;
using namespace System::IO;
int main(){
JOYCAPS jc;
joyGetDevCaps(0, &jc, sizeof(JOYCAPS));
WORD xid=jc.wPid;
/Definitionen
UINT JOYSTICKID;
JOYINFO joyinfo;
//JOYCAPS joycaps;
unsigned int Xwert, Ywert, Zwert;
//Auswahl des Joysticks
JOYSTICKID = 0;
StreamWriter ^datei = gcnew StreamWriter("Rauschen.txt");
//Abfrage (in Programm einbinden)
int i;
for (i=1;i<1000;i++)
{
joyGetPos(JOYSTICKID, &joyinfo);
//Hole X,Y,Z und Buttonwerte
Xwert = joyinfo.wXpos/4;
Ywert = joyinfo.wYpos/4;
Zwert = joyinfo.wZpos/4;
Console::WriteLine(Xwert);
Console::WriteLine(Ywert);
//Console::ReadLine();
Sleep(10);
datei->Write(Xwert + ";" + DateTime::Now.Ticks +";\n");
}
datei->Close();
}
Messbereich und Auflösung des Sensors
Laut Datenblatt Auflösung 14 bit bei ± 1g
bei einer Initial- Auflösung 14 bit bei ± 2g sind dies für ± 1g genau 13 bit
also beträgt der Messbereich ± 8192 bzw 4096 für jeweils 1g oder
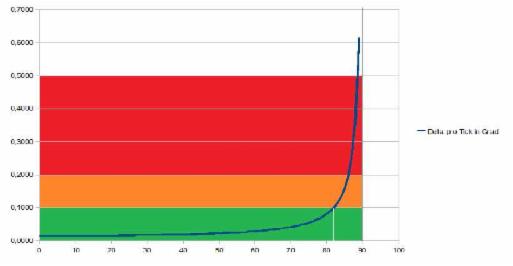
der Bereich 0° bis 90° erstreckt sich über 4096 Messwerte
Messbereich bei 2g
Diagramm Auflösung in ° bei 0g bis 1g bzw 0 Grad bis 90 Grad bei 1 Digit Messwertänderung
Die Soll-Ist-Abweichung der Messungen am Beschleunigungssensor setzt sich zusammen aus:
allgemeine Aufstellungsfehler
Abweichung in Azimut (Südrichtung)
Neigung der Azimutebene
Höhenabweichung der Polachse
Sensoren-Ausrichtungsfehler
Achsabweichung der Sensorachsen x,y,z gegenüber dem Teleskop.
Nichtlineare Fehlerrechnung
Korrektur der Nichtlinearität der Sensoren
Ermittlung einer Korrekturmatrix über den kompletten Raumwinkel in einem Gitternetz von 10 bis 30° zur Interpolation innerhalb des Gitterpunkte.(Pointing)
-------------------------------------------------------------------------------------------------------------------
Der Aufstellungsfehler wird im ersten Schritt nicht berücksichtigt, da davon ausgegangen wird, das das Teleskop gescheinert ist und damit in Höhe und Azimut ausgerichtet ist.
Die nichtlinearen Fehler werden erst später in Betracht gezogen, wenn eine höhere Messgenauigkeit angestrebt werden soll.
D.h. die Korrekturrechnung beschränkt sich auf den Sensor-Ausrichtungsfehler.
Der Sensor weist gegenüber dem Teleskop einen Drehwinkel in x, y, und z auf.
Da ein konstanter Drehwinkel keine konstante Höhenabweichung aufweist sondern eine Funktion des Stundenwinkels und der Deklination ist, lässt sich die Höhenabweichung am besten durch ein rotierendes Koordinatensystem beschreiben.
Nach diesen Überlegungen wurde eine mathematische Beschreibung für den Ausrichtungsfehler zusammengestellt.
Die Genauigkeit und die Methoden zur Ermittlung der Achsabweichung des Sensors spiegeln sich in der Teleskopkalibrierung und dem Alingnmentverfahren im Programm wieder.